Mainnavigation
Subnavigation
BORDER
Pagecontent
Space-based Radar Analysis
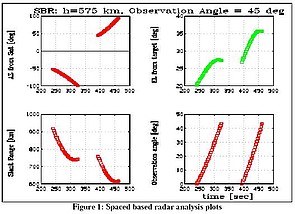
The se plots and map come from an analysis of a space-based radar system. The script for this analysis is shown below.
% Space Based Radar
%
% A space based radar in LEO orbit around the earth is aquiring
% targets and observing them over a specified observation angle.
% After observing the one target the SBR is aquiring and observing
% another target. The slew angles of the satellite, the integrated
% observation angle and the angle from the targets to the SBR are
% computed and displayed
clear;
clearGraphic;
removeAll;
% loadreplaceAll("./SBR.data")
% Start of simulation
setSimEpoch(2000,3,21,19,55,0);
addEpoch('equinox',2000,3,21,12,0,0)
addEpoch('Start',2000,3,21,12,0,0)
addSatellite('SBR',6953.137,.03,63.435,0,45,0,'equinox');
addStation('Denver',I_earth,0,39.75,-104.99,1.61);
addStation('Little Rock',I_earth,0,34.74,-92.28,.087);
addStation('Chicago',I_earth,0,41.87,-87.64,.181);
%Limits:
%
% Constraint on satellite: 45 < AZ < 135 || -45 > AZ > -135 deg
SAZmin1 = 45*d2r;
SAZmax1 = 135*d2r;
SAZmin2 =-135*d2r;
SAZmax2 = -45*d2r;
% Constraint on target: 20 <= EL <= 70 deg
GS_ELmin = 20*d2r;
GS_ELmax = 70*d2r;
% Pickup Constraint: 45 <= AZ <= 85 || -45 >= AZ >= -85 deg
PCAZmin1 = 45*d2r;
PCAZmax1 = 85*d2r;
PCAZmin2 = -85*d2r;
PCAZmax2 = -45*d2r;
% Integration angle of observation 45 deg
cos_int_ang = cos(45*d2r);
nStations = NumberOfNodes(1);
nMobiles = NumberOfNodes(2);
nSatellites = NumberOfNodes(3);
iSatellites = nStations+nMobiles+1;
nNodes = NumberOfNodes(4);
g_earth = GeoPosition(1)*r2d;
for i=1:nStations
latitude(i)=g_earth(1,i);
longitude(i)=g_earth(2,i);
endfor
% open display
%id=addMapView();
id=1;
setLineColor(id,"white");
dt = 3; % simulation step in sec
maxt = 800; % maximum simulation time in sec
t = 0:dt:maxt;
iStart = 0;
j = 0;
jj = 0;
setSimStepSize(dt);
for t1 = t,
[d,r,a,el,v] = RelPosition();
jj = jj+1;
EE(jj) = el(3,4)*r2d;
AA(jj)=a(4,3)*r2d;
%if satellite is in target constraint start observation
if iStart < 1,
ETarget = el(1:nStations,iSatellites);
condTarget = 0;
for i = 1:nStations,
if condTarget==0,
if ETarget(i) >= GS_ELmin && ETarget(i) <= GS_ELmax,
eTarget = ETarget(i);
aSat = a(iSatellites,i);
%check pickup criteria
if ( (aSat >= PCAZmin1 && aSat <= PCAZmax1) ||
(aSat >= PCAZmin2 && aSat <= PCAZmax2)),
condTarget = i;
endif
endif
endif
endfor
endif
if condTarget > 0,
eTarget = el(condTarget,iSatellites);
aTarget = a(condTarget,iSatellites);
if eTarget >= GS_ELmin && eTarget <= GS_ELmax,
%if target is in satellite constraint
aSat = a(iSatellites,condTarget);
if ((aSat >= SAZmin1 && aSat <= SAZmax1) ||
(aSat >= SAZmin2 && aSat <= SAZmax2))
if iStart < 1,
iunitvector = unitvector(aTarget,eTarget);
iStart = 1;
endif
uv = unitvector(aTarget,eTarget);
cos_sw_angle = uv`*iunitvector;
%within observation task
if cos_sw_angle >= cos_int_ang,
j = j+1;
afs(j) = aSat*r2d;
eft(j) = eTarget*r2d;
D(j) = d(condTarget,iSatellites);
V(j) = r(condTarget,iSatellites);
T(j) = t1;
OA(j) = acos(cos_sw_angle)*r2d;
g_Sat = GeoPosition(N_satellite)*r2d;
lonS = g_Sat(2);
latS = g_Sat(1);
lonT = longitude(condTarget);
latT = latitude(condTarget);
drawLine(id,lonS,latS,lonT,latT);
else
iStart = 0;
condTarget=0;
endif
endif
endif
endif
stepSim;
endfor
erase
window('111')
title('SBR: h=575 km, Observation Angle = 45 deg')
window('221')
plot(T,afs,'grid','red,point=3')
ylabel("AZ from Sat [deg]")
window('222')
plot(T,eft,'grid','green,point=3')
ylabel("EL from target [deg]")
window('223')
plot(T,D,'grid','red,point=3')
ylabel('Slant Range [km]')
window('224')
plot(T,OA,'grid','red,point=3')
ylabel('Observation angle [deg]')
xlabel('time [sec]')