Mainnavigation
Subnavigation
BORDER
Pagecontent
- You are here:
- Home »
- MLDesigner »
- Examples »
- Control Applications »
- CAN Bus Model
A CAN Bus Model
A simple CAN (Control Area Network) bus system
The Model
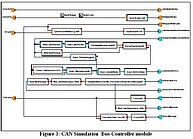
The top-level CAN model is shown below. It consist of two major components
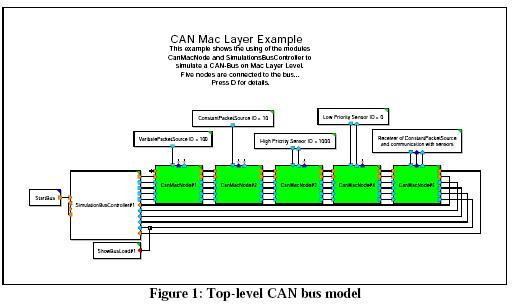
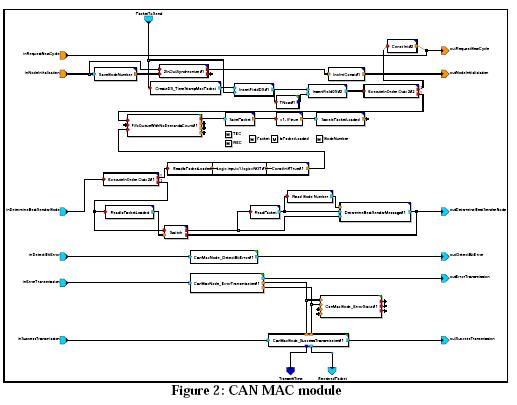
CAN MAC Node Details
This module represents a node of the CAN bus. All incoming packages from port "PacketToSend" saved into a FIFO-queue. After transmitting, a package will put to the "ReceivedPacket" output port of every Node excluded the transmitter node. The time from entering the queue and transmitting successfully is calculated an put to "TransmitTime".
Bus Controller Module
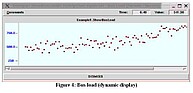
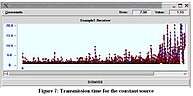
The CAN Simulation Bus Controller module controls the operation of the bus. The controller module starts by determining the number of nodes. Once the number of nodes has been determined, the controller shifts to a loop pattern called bus cycle that is repeated until the simulation stops. One bus cycle consists of following iterations over the nodes. The first iteration determines the node, which is dominating the others. After calculating the length of the message the next iteration leads to the result, whether one node detected an error or not. Then all nodes are informed by another iteration about that result. The model generates several dynamics reports, such as those shown below. Other reports (dynamic and summary) are easily added.